








")












As usual, we started the day with a briefing to discuss the agenda for the day and to answer any queries.

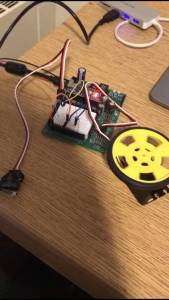
We then proceeded to work on our robots.
We discussed and took measurements such as, force, distance and speed which would be needed when coding and designing the robots.




Each of us had different strengths and were tasked to work on the robot based on our specialisations.
Ahmed (Egypt) worked on designing the hands of the robot using SolidWorks.
Toda (Japan), Michel (Brazil) and Hassan (Egypt) worked on writing codes for the motors and sensors for the robot. We used Arduino software and hardware.
I was in charge of the construction and design.



While most of the team worked on the robot, I volunteered to attend an architecture workshop.
During the workshop, we were given a tour and briefed on the safety requirements when using the shop.
I was impressed with the tools they have there. There were multiple laser cutters and 3D printers for us to use. There were rooms with special ventilation for spray painting.


In the afternoon, our team presented our ideas on the mechanisms we planned for our robots to complete the moon mission.
It was nerve-wracking as we were uncertain with our design. Luckily, our professors gave us feedback on how to improve on it.

After a long and hectic day, Jaryl and I went to visit the MIT museum!

My favourite was the architecture section.
I loved the shapes and the grooves! It gave me ideas for my architecture projects in the future.




The mechanical section was interesting because it was moving.













{kind=link}