








")












After a day of rest over the weekend, we were back to the testing of our robot yesterday. Most robots are fine, however there will always be features to be improved. For my case, the robot was initially designed to have a mouth which open and closed in order to capture the pills in the field.
However, those gears that we had bought are significantly too small, thus the gears usually slipped. To solve that issue, we had changed the gripper design to a roller which rotates 360 degrees and capture everything that is in its path.
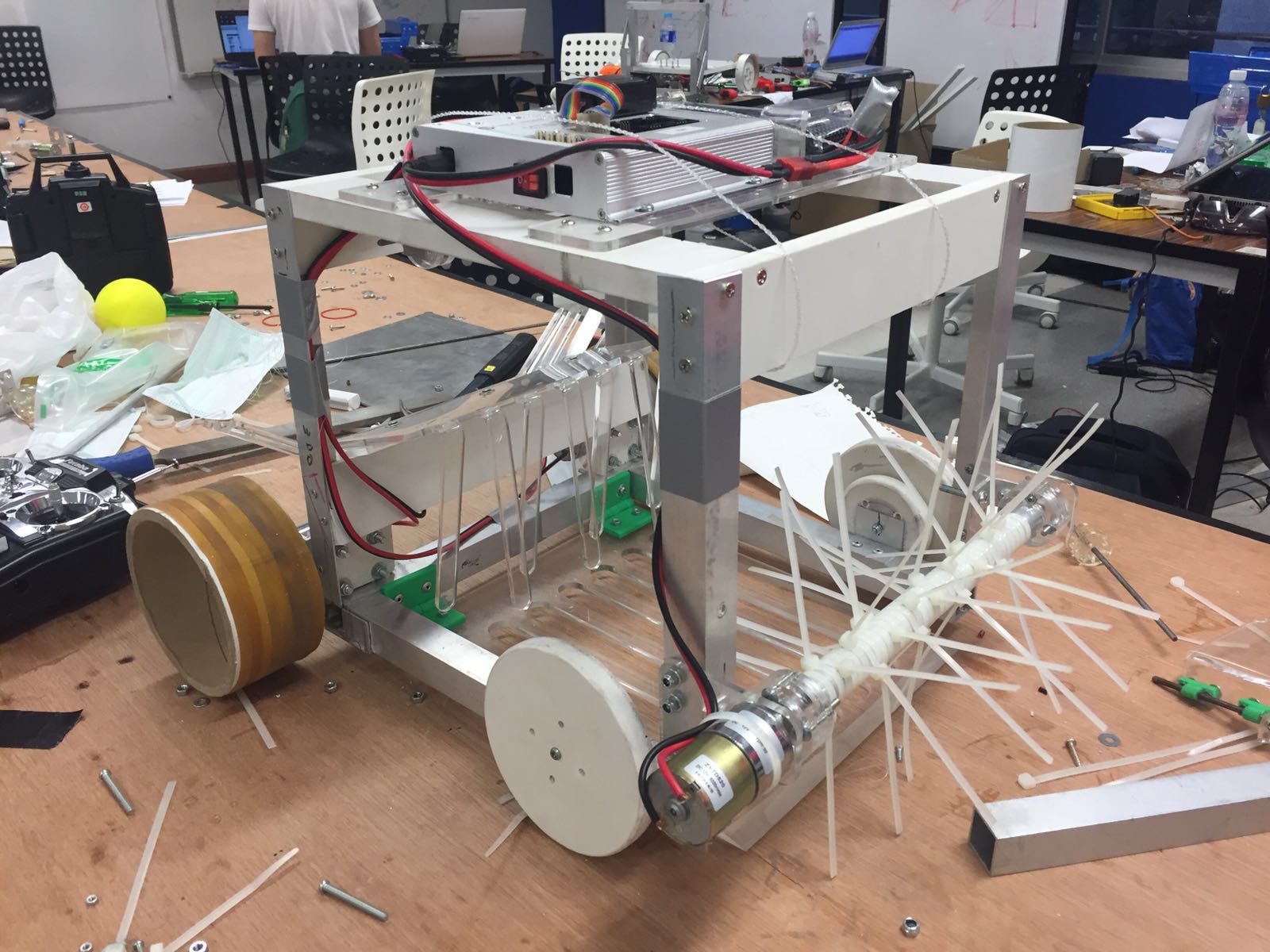
This significant improvement had made the robot much better interm of speed and accuracy.
I am sure we are not the only group that made such a drastic change. Everyone is preparing hard for the seeding contest in a few days.










{kind=link}