








")











")
Not too long ago, Prof Mohan and his team sat huddled in their research laboratory, all eyes fixed on one YouTube clip in particular. On the screen, a cebrennus rechenbergi, or cartwheeling spider, is in its element doing its thing – climbing, jumping and tumbling across the vast Moroccan desert.
Several months later, the team unveiled Scorpio, an award-winning urban reconnaissance robot that’s much like the rechenbergi’s robotic twin. It’s impressive. And it’s the first robot to ever combine three locomotion features – crawling, rolling and wall climbing – in a single machine.
“Currently, we have robots that can roll, climb or crawl, but none that can do all three,” Prof Mohan substantiates, “Scorpio is the first demonstration of such a transformer platform.”
It should be clear by now that these individuals are no David Attenboroughs studying the wonders of entomology. Rather, they are brilliant researchers in the field of robotics, adroitly taking cues from the natural world (amongst other things) to inspire their field of work.
Who is Prof Mohan?
Professor Mohan Rajesh is Assistant Professor at the pillar of Engineering and Product Development (EPD) and leads the 38 researchers at the Robotics and Automation Research Lab, or more intimately known as ROAR.
Home to many awe-inspiring robotics projects, the lab offers an appealing preview of the future inhabitants of our world – which is exactly why we’re here with Professor Mohan – to find out how the humans of today are creating the robots of tomorrow.
How the SUTD DNA informs the Design process
Prof Mohan’s inventions may look complex, but it’s surprisingly easy to comprehend the philosophy behind them. They’re all rooted in one simple belief – the design process. “It’s very important to have trust in the design process,” says the passionate professor.
A systematic design process is like the backbone of any project. It keeps everyone in the team on track, and that’s vital, because it takes many humans from various disciplines – from engineers to computer scientists to material experts to architects – to put a robot together. Working with a common objective and understanding is imperative.

Focusing on the process is also what separates the SUTD brand of creations from other institutions. “For us, when we talk about design, we don’t always tie it to the end artefact like what other universities do. Here, there is equal focus on the attributes of the artefact, the processes and of course, the end artefact itself,” he explains, “and that empowers us to think about areas that are never before experimented or thought about.”
This process is what Prof Mohan describes as the “SUTD Design DNA” – the very DNA that led to the creation of the bio-inspired Scorpio and many other award-winning projects such as their sTetro and hTetro robots incubating in his lab.
The problem with the Roomba (and its class of floor cleaning robots)
To further demonstrate the importance of the design process, Prof Mohan directs our attention to an interesting family of reconfigurable robots that his team is fervently working on – floor cleaning robots.
In case you’re wondering, yes, we’re talking about the Roomba-type floor cleaning devices. The adorable circular machines that are inhaling the dust out of some of our homes. These machines are useful, no doubt, but they also come with limitations.
One of their biggest issues, according to Prof Mohan, lies in what he calls their “fixed morphology.” This means our favourite robotic minions are limited by their shapes, making it difficult for them to access tricky corners and spaces, and thus limiting their overall area of coverage.
“Homeowners don’t want their robots to cover only 60-70% of the floor area while the remaining 30-40% becomes their job. Nobody likes a helper like that,” says Prof Mohan with a laugh.
Creating new solutions for cleaning robots through leapfrog innovation
“In our lab, we look at leapfrog innovations to solve the issue,” Prof Mohan shares. Acknowledging our limited knowledge, he generously decides to give us a crash course on design basics.
“There are three levels of innovation that you need to know,” he begins. First up, an innovation delta. This sort of innovation happens when, for example, designers of the Roomba decides to change its shape from circular to square to solve the issue of difficult room corners.
Then, designers noticed that there is still merit in keeping the circular edge. That’s when we see hybrid D-shaped devices. That, according to Prof Mohan, is a form of incremental innovation.
What then, is leapfrog innovation? “It’s a process where we move away from existing morphologies and look at radically different form factors that our robots can take. This offers a lot more possibilities for us as we approach a problem at hand,” the professor explains.
Shapeshifting floor cleaning robots
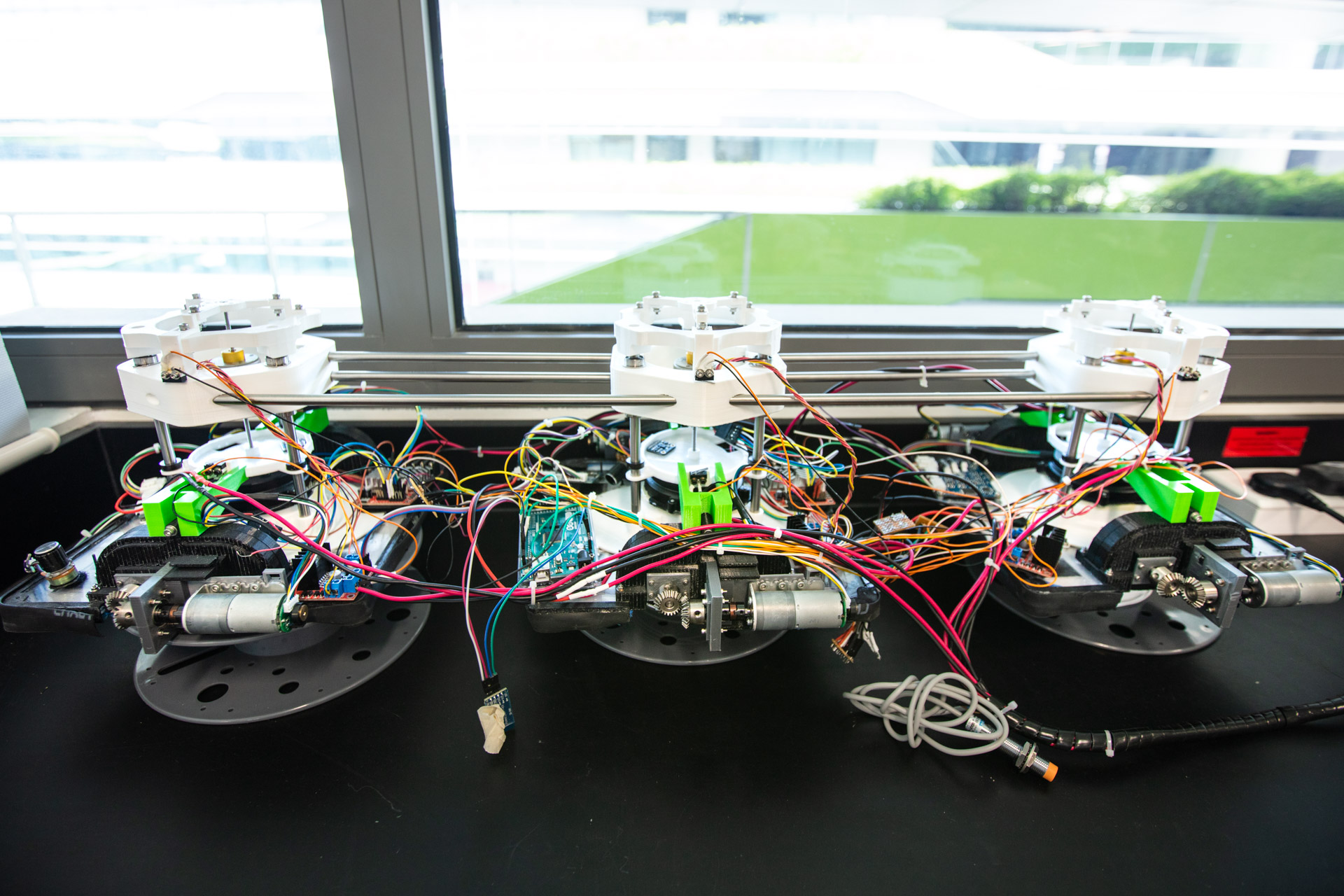
The team’s answer to the morphology issue of floor cleaning robots is a family of Tetris-inspired shapeshifting machines. These robots, as Prof Mohan defines, “can automatically change their form factors in constrained environments to achieve a significantly higher area coverage.” – just like how Tetris blocks can be effortlessly manipulated to fit in to various puzzles.
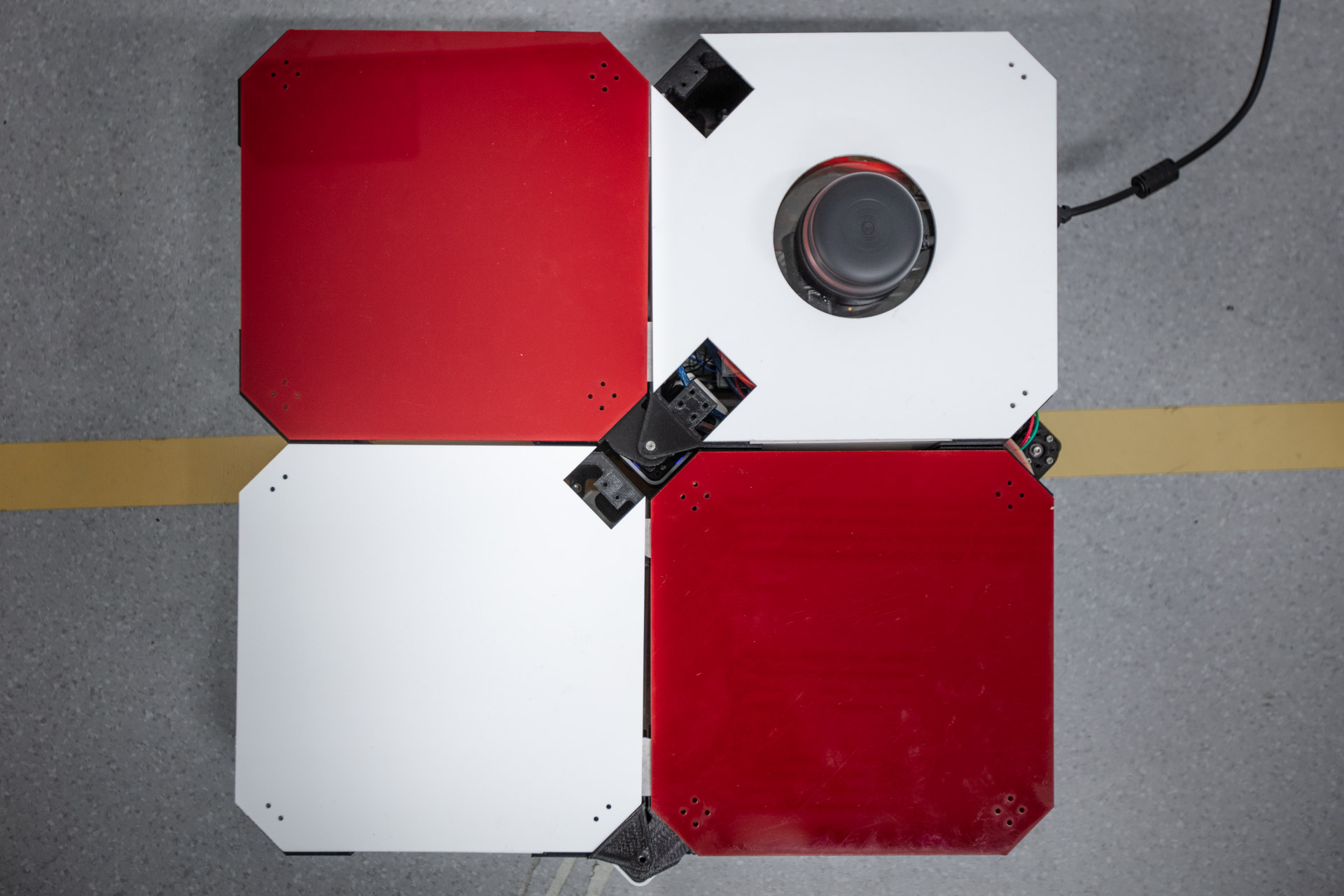
With this as a foundation, the team came up with inventions like the hTetro, a floor cleaning robot that is capable of switching up to seven different morphologies, and the sTetro – a first-of-its-kind creation that can detect, climb and clean staircases – a function that many floor cleaning devices in the market today deliberately avoid.
“We’ve already run several experiments to benchmark the performance of our robots against top players in the market, and in most cases, we were able to outperform these fixed morphology platforms. It’s a very heartening result.”
Robot ergonomics – a novel study
The topic of home environments quickly led to yet another one of Prof Mohan’s exciting projects – robot ergonomics.
Don’t be surprised if you haven’t heard of the term at all. It’s a completely new branch of study born out of a casual conversation between Prof Mohan and an architecture professor, of whom he’s co-teaching a design course with. “We were discussing our research interests when we thought, ‘why are we not looking at spaces where these robots live and operate?’”

Just like how we design spaces for different groups of humans, robot ergonomics studies the design of spaces and products for robots. Here, they’ve completely integrated robots into our social spaces, making them one of the many stakeholders in our society.
An inclusive space for our robotic friends
Trials and experiments are already underway for this study, including one where the team tested the interaction of floor cleaning robots with IKEA chairs.
“What we have found is that minor changes to the way furniture are arranged and/or designed will have a huge impact on the performance of cleaning robots,” Prof Mohan illustrates, “in the case of the chairs, things like the number of legs, the point of contact, angle of inclination – they are all primary factors that affect the accessibility for robots.”
“This is also one of the best examples on the importance of the design process,” he adds, “we’re improving the performance of robots even without touching them. It’s something you can’t achieve if you’re focused on just the design of the robot itself.”
With these findings, the team hopes to work with furniture designers to design a future that is friendlier and more inclusive for our new robotic friends. And who knows, those futuristic backdrops we see in the movies may just arrive sooner than expected.
From lab to reality
Having developed promising prototypes, the next step for the team would naturally be to translate them to reality.
“We are gearing up to establish ourselves as a leader in cleaning and maintenance robotics,” Prof Mohan relates, “and we are working very closely with NEA (National Environmental Agency) to run trials and pilots on a larger scale. Eventually, we are working towards translating these robots to the market.”
For Prof Mohan, robotics, in the next decade, is bound to revolutionise our lives like how IT did in the last ten years. Till then, he will continue to shape our future, one robot at a time. “We won’t stop innovating. Because we’re all doing this for passion,” he concludes with a smile.
Like what you just read?
Find out more about our programmes and application process here.
It can be hard to ask the right questions that will help you to decide which university to join, so we’ve compiled a list of FAQs for you here.










 to inspire their field of work.){kind=link}